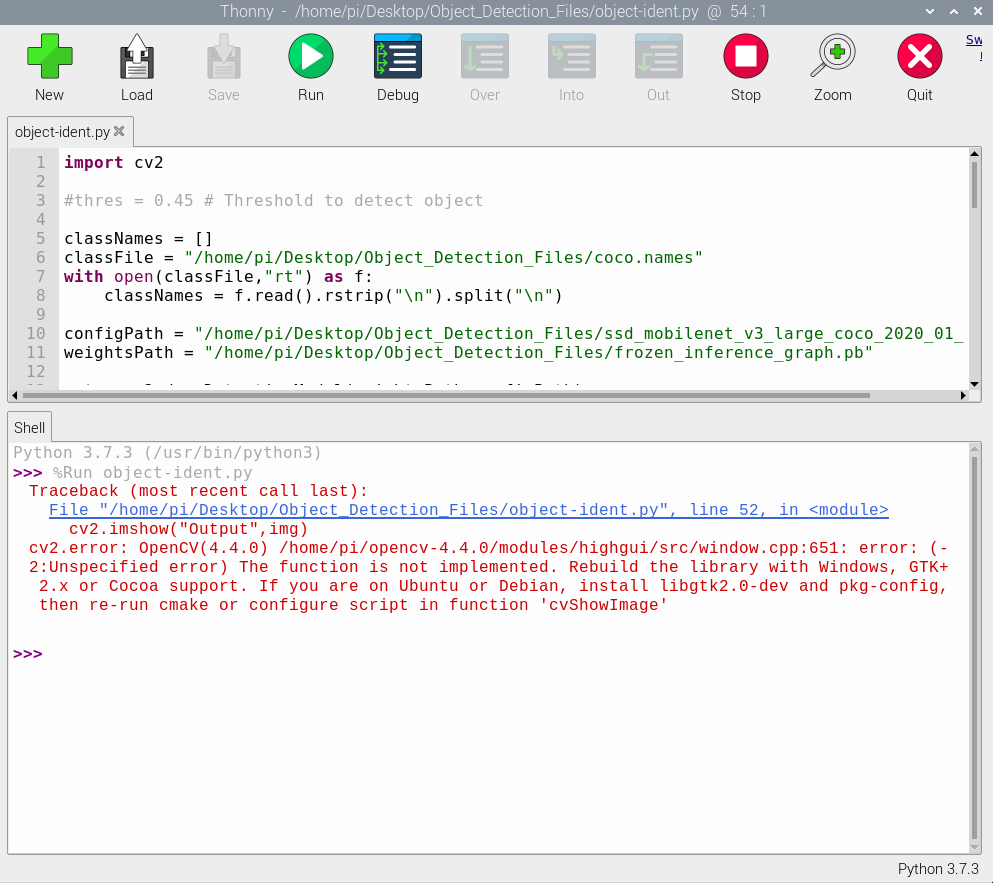
I don’t know why, but it would always says abort after I try to update one of those terminal command lines. Over the last 3 days I’ve done the Y/n commands a hundred times without issue. Even in the screen shot above, I hit “Y” then “Enter”. I don’t know how you would get past that line without hitting Enter after a Y or an n. Because of this I’ve still not been able to install the multi line CMAKE commands on any Pi other than the one that was having the issue in Thonny. So I hammered away on that one since it was further along at least.
I re ran all of the terminal commands again from scratch as though I hadn’t already done it once and after all of that, it magically ran this time.
I am super curious as to why I can’t get the CMAKE commands to go on any other installation or get that “build-essential cmake” line to stick, but at this point,that’s a problem for another day.
Anyways, its running now at least. I have more tinkering to do so these may be solved by the time this gets a response but I have 1 issue and 2 question.
The issue I’m having here is, I’m getting roughly a 2 second delay. More than most seem to have. I’m also only tracking cats so it should be a lighter workload than average. I’m running on a Raz 4, 4GB with a small heat sink. Haven’t messed with any overclocking or anything else. Only thing I’ve done out of spec so far is I’ve enabled “Serial Port” under “Interfaces” since I plan on exporting data to an Arduino later. I’m also using an official Pi camera and have a class 10 SD card.
I will try putting a fan on the heat sink tonight, and see where that gets me. If that doesn’t work I will look into over clocking, which I’ve seen you explain in comments above. If all else fails I will get a Coral stick but I wanted to make sure I was working on a solid foundation before I added anything fancy like Coral or Overclocking.
So my questions are code questions. Well the TLDR for this one is: How can I get the (x, y, w, h) from the boxes this code draws on the target?
I’m basically trying to track cats in a room so I’ve been flipping between your code here and your code form the Face Tracking Pan Tilt Hat. In the Face Tracking I see that you use “cv2.rectangle()”, but in this posts code you aren’t using that command. I see where it happens still as you commented it for us (4th line from the end or so), but I don’t understand how this draws the box without the specific .rectangle method. So my main question here is, how can I pull the (x, y, w, h) from any boxes drawn.
Other question is: Is there a simple way to limit the detections to a maximum of 1? I tried changing the NMS to 0.1 and that still occasionally gave me some stacked boxes. I was going to experiment with using a value of Zero here in a bit but I assume that will not work lol. All the NMS guides on Google seem overly complex for what I’m attempting to do here so just curious if there is a simple way to set a cap of 1 detection. Not a huge deal, but if there is, cool.
Thanks for the response. I’m sure it takes a lot of time to reply to all these project questions and I appreciate you helping all of us beginners. Honestly don’t know if I could have even gotten OpenCV installed without your help.
Pretty interesting doing all this OpenCV research on my lunch at the company that started its development. I was wondering if it was actually designed in my building, but looks like it’s main contributors were from around the globe and not one facility.