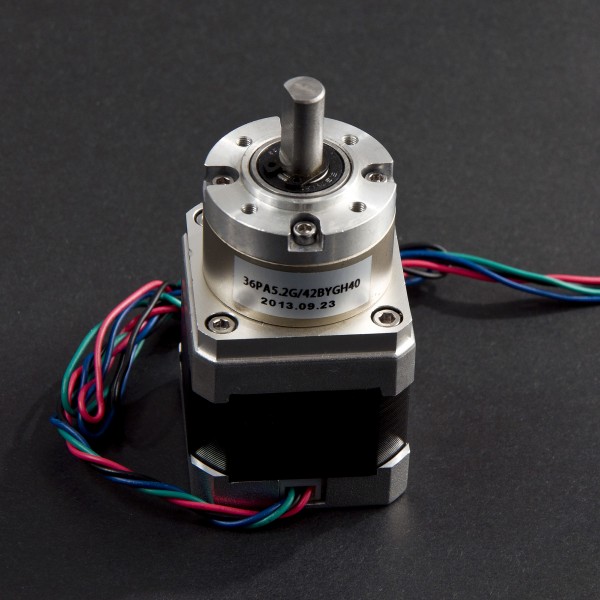
This bipolar stepper motor with planet gear box (gear ratio: 5.18) uses a standard 8mm-diameter D type output shaft, and has a 1.8° step angle (200 steps/revolution). Each phase draws 1.6 A at 2.78 V, allowing for a holding torque of 18kg-cm (176N-cm). The motor has a body dimension of 42mm square and 40mm in length, while the planet gear box is 36mm in diameter and 27mm in length. The motor has four color-coded wires terminated with bare leads: black and green connect to one coil; red and blue connect to the other. It can be easily mounted with 4 M3 threaded holes and can be controlled with the Dual Bipolar Stepper Motor Shield for Arduino (A4988).
That should be correct, although if you’d like we should be able to set up a little test here in the warehouse to make sure. However, that may not be necessary for your application, what you may be able to do is use micro-stepping to reduce the holding torque on a “Normal” stepper and get smaller steps for your project, although they’ll become less accurate in position as you’re essentially taking advantage of the fact that a stepper motor isn’t rigidly required to be in any given position and can move freely between them.