New video! Designing experiments for microgravity from the safety of our 9.8m/s/s has its challenges. Considering the price of rocket fuel it’s not so simple to just send your project into space on a whim, so we designed a school-friendly random positioning machine to simulate a low-gravity environment for the specimens mounted within. We were delighted to partner with the Powerhouse Museum and Claire from Unconvengineering to help make this educational workshop come to life.
Join us as we cover the process of designing, assembling, and testing our 3D-printed random positioning machines. https://www.youtube.com/watch?v=Wz8sjB6MxHA This video can also be viewed here
Hi Michael, awesome video and idea. I am interested in developing my own RPM and was wondering if you could point me towards how you are able to determine the gravitational acceleration and rotation set points for the frames please? I’m hoping to be able to set a value and then continuously see what the simulated gravity on the plate should be.
Welcome to the forum! If you want to know some more info about the plate you could include a 9 DOF sensor on there to get some values. My first thought here was cable management issues but this project already solves that using slip rings.
There are a wide variety of sensors available that could work. Hopefully this provides some start point.
Designing experiments for microgravity from the safety of our 9.8m/s/s has its challenges. Considering the price of rocket fuel it’s not so simple to just send your project into space on a whim, so we designed a school-friendly random positioning machine to simulate a low-gravity environment for the specimens mounted within. We were delighted to partner with the Powerhouse Museum and Claire from Unconvengineering to help make this educational workshop come to life. Join us as we cover the process of designing, assembling, and testing our 3D-printed random positioning machines.
If you have any questions about this content or want to share a project you’re working on head over to our maker forum: http://coreelec.io/forum
Core Electronics is located in the heart of Newcastle, Australia. We’re powered by makers, for makers. Drop by if you are looking for: • Raspberry Pi [https://core-electronics.com.au/raspb…]
The following trademarks are owned by Core Electronics Pty Ltd: “Core Electronics” and the Core Electronics logo “Makerverse” and the Makerverse logo “PiicoDev” and the PiicoDev logo “GlowBit” and the GlowBit logo
Hello,
I am a highschool student currently researching the developmental effects of altered gravity in drosophila larvae. For the microgravity simulation I chose this design. So far all has been going well, but upon my first couple of trials, I noticed the machine would make short movements that would soon after revert after a long pause. I understand that it’s supposed to be continuously reorienting. After going on other forums I haven’t been able to find a solution, I can only assume there’s an issue in the code. If anyone had any advice or ideas it would be greatly appreciated.
Thank you!
That certainly sounds like an interesting project! The machine is “continuously re-orienting”, but I don’t think the behaviour you are describing is intended.
To start, we need a few more resources, namely:
Photos of your setup
A video of the issue
Description/Snippets of the code
I am assuming you’ve ripped the code straight from the GitHub Repo for the project, in which case it should be the same on your end as it is on ours. However, it is still good to establish a baseline when troubleshooting.
Thank you so much for your response but after working with it for a while I figured out I had the wrong servos. After modding them, the RPM worked perfectly.
Thank you again for your time!
Great to hear that you got it sorted! If you run into any other issues feel free to ask away here and either one of our staff or another member of the forum will help out.
I am trying to build this as a part of my master’s thesis. In the long term, I’d like to scale it up but for now I am trying to build this one as a prototype. The problem I have is that the servos stop working after a while (few hours), and then they will either restart when I manually turn them, or start again one time out of ten. It all worked fine at first for a few days, but now the servos won’t start when I plug the circuit.
I am trying to figure out if the problem comes from the servos or the circuit. Could it be a problem with the power source? I am using a 5V/2A USB charger.
Other than that I am using the exact same setup as shown in the video.
That’s a bit of a weird one if it is failing after a few hours. I have a few questions to try and narrow down the issue:
What Controller are you using to drive the servos? That power supply should be more than capable of driving two FS90MR Servos but it may be struggling if it is powering other devices as well.
In our video for this project we run into an issue with the slip ring failing. It doesn’t sound like this would have failed completely in your case but could it be possible that this is losing connection a few hours into running?
When the failure occurs, can you detect any power going to the servos? I would suggest breaking down this project into sections and checking each one at the time of failure to see if you can figure out where along the line of power source to servo this is not working as expected.
Hope this helps! Will keep an eye out for a response.
I’m using a rasberry pi pico, like the one in the video.
I don’t think it could be the slip ring, because both servos seem to have this problem.
There is still power that goes to the servo, which is why I think they must be the problem. I was just trying to figure out if the power source could have somehow broken them. It worked fine at first…
If you are using plastic gear servos then the internal could be worn down from the constant load. If you have the servos that have the blue plastic exterior then you should be able to make out the internals.
Are you able to send some images of your prototype? I imagine it is near identical to the original, but it’s always good to have a visual when dealing with elusive issues like this.
In the video of this project, Michael mentions that he and Ahmed did a lot of “post-processing” on the 3D printed parts. Is it possible there is some hook or snag from a printer error that is causing the servos to lock up? This would be strange given that it worked no problem for multiple days, but possible nonetheless.
Apologies for the delay in responding—I was testing a few more things. The servos work fine (for multiple days) until I put them under load with the RPM. After running for a few hours, the servos start to get hot and eventually fail. Do you think it could be because the RPM is too heavy (I’m using the same servos, so this would be surprising) or maybe the weight is not properly balanced?
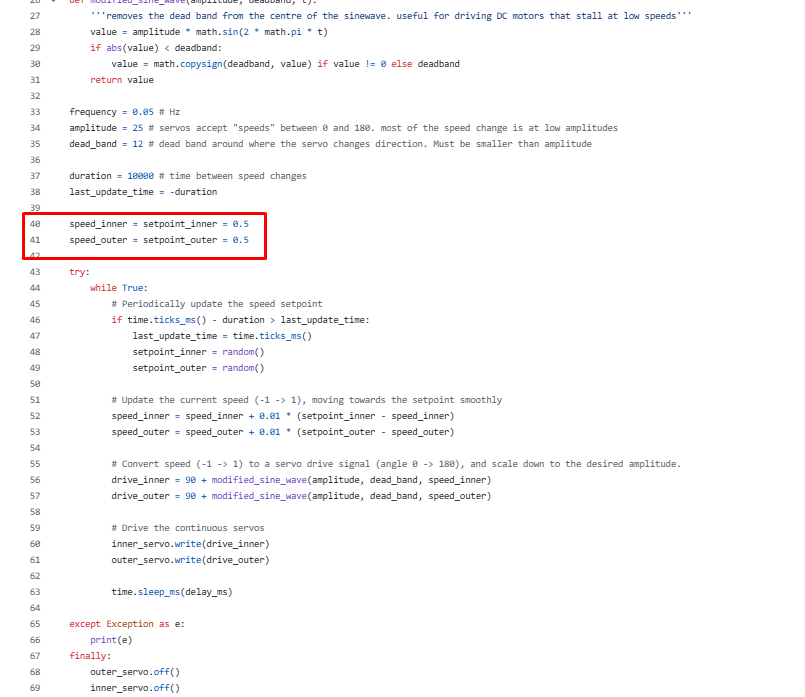
We did some testing over the weekend with some similar servos and found that moving them quickly under load would cause them to heat up and fail prematurely. If you’re finding that your servos are getting hot I would recommend slowing them down in the code (highlighted in the picture below), this should help to extend their service life.
This is such an awesome project! How did you guys verify the presence of microgravity within the system? Or was it assumed based on the performance type.
This project was built in collaboration with a local school program to allow students to try and simulate microgravity. I believe it was loosely based on papers that we found on the subject, and so this was an attempt to make a random-positioning machine that was easy enough to be made in a school environment.
So we didn’t rigorously test this under lab conditions, but it would serve as a good starting point to develop a low-cost and accessible machine.