DC Motor Control HAT
Using a Raspberry Pi to control DC motors needs additional hardware and I wanted to create a minimal sized HAT to cover a lot of requirements as listed below.

Specifications
- 3 channel DC Motor control using SN754410ne drivers using the DFRobot motors.
- 3 channel encoder ls7184n processing (processed before it gets to the Pi so that you just get a direction and steps # flag)
- 2 channel MOSFET FQP30N06 switching for external devices
- SPI breakout
- RF24 wireless breakout
- 5v input for Pi
- specific motor input so that you can run different voltage motor types
- Piezo buzzer
- Raspberry Pi GPIO header
- 3 x RJ45 headers for connection to the motors to have motor control and pass back the encoder data.
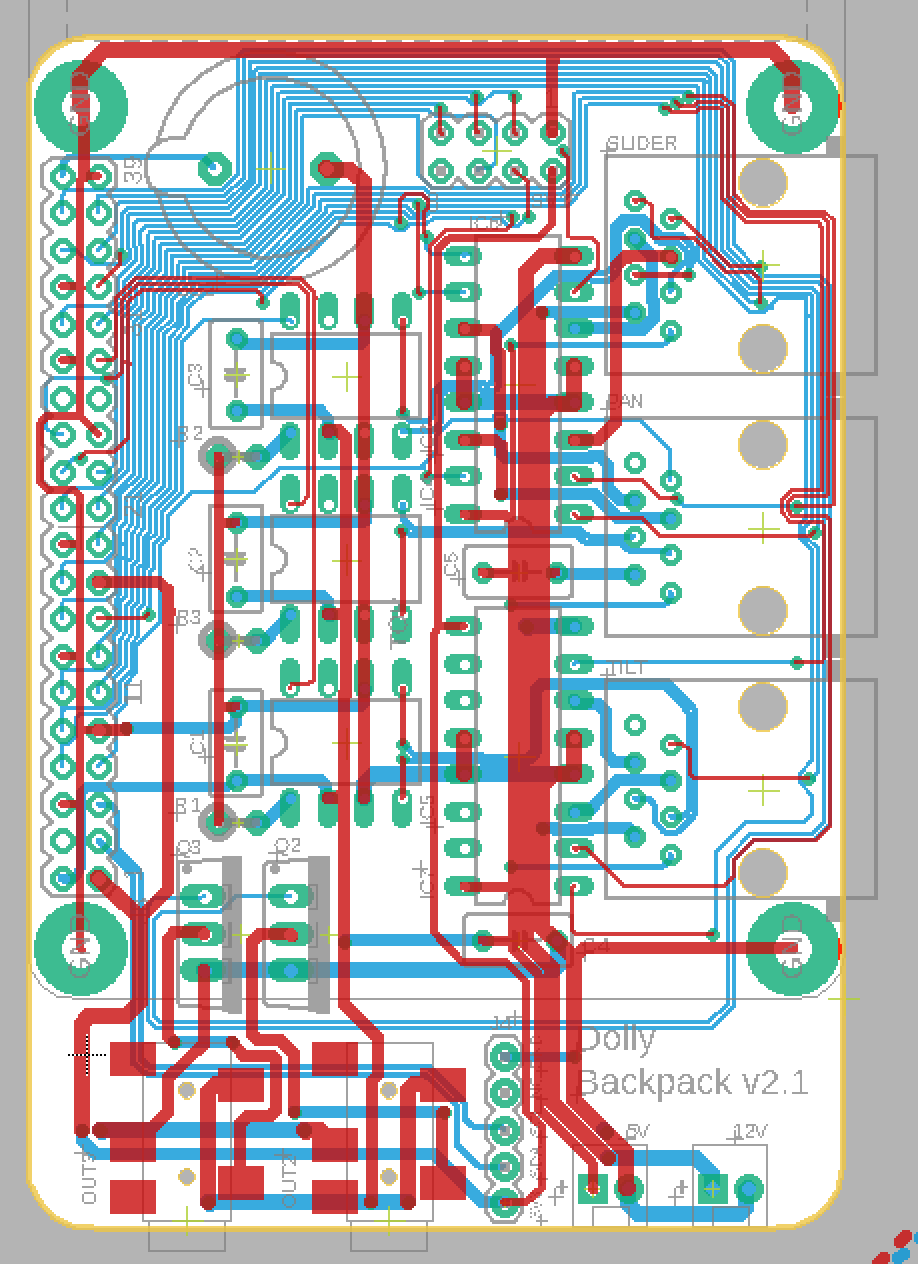
Board
Schematic

This add on HAT uses just about every single GPIO pin to achieve motion control of 3 axis of DC motors.
The encoder IC provides a direction and utilises the A and B channels from the Motor encoder to give an accurate position.